


Rangel Karaivanov
Lehrbeauftragt
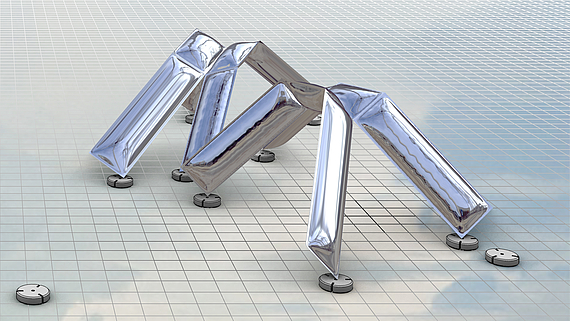
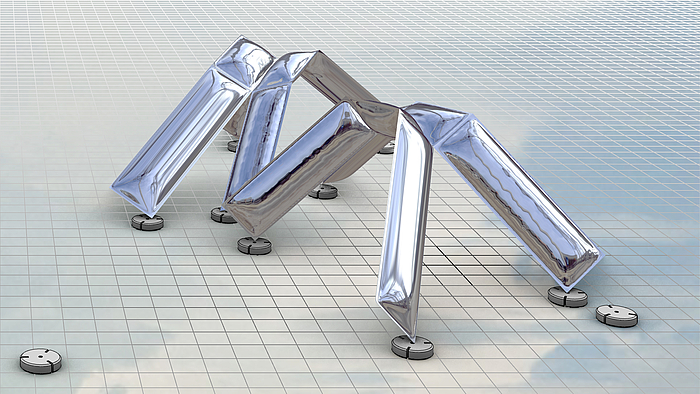
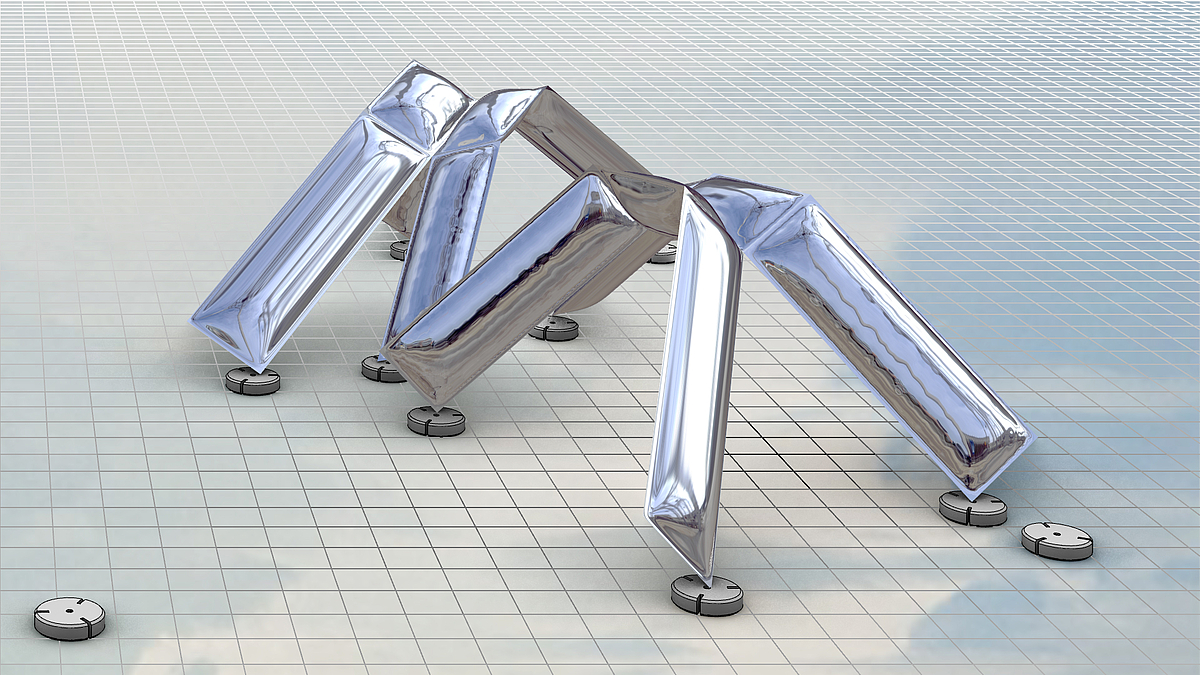
Kinematic Pneumatic ist ein design-to-built Seminar in dem wir raumgroße ultra-leichte bewegliche Strukturen entwickeln und gegen Ende des Semesters einen Prototypen bauen und animieren. Als Grundlage für die Bewegung werden wir einfach zu steuernde Roomba Roboter nutzen.
Inhaltlich werden wir uns zunächst in den ersten Seminaren die digitale Grundlage in Rhino3D und Grasshopper aneignen und die Steuerung der Roombas näherbringen. Parallel dazu machen wir Materialstudien zu den Folien und Membranen die wir für den Prototypenbau nutzen können und wie sich mit solchen Strukturen Gelenke und Bewegung gestalten lassen.
Termine:
Aktuelle Infos auf StudIP
Letzte Änderung: 12.10.23


